
I am currently a Master’s student in Mechanical Engineering (Robotics) at Columbia University, New York. I received my Bachelor’s degree in Robotics Engineering from China University of Petroleum (Beijing) in 2024.
My research interests include Robotics Learning, Probabilistic Robotics, Optimal Control, and Computer Vision. I am passionate about building autonomous systems that can operate robustly in complex environments.
📖 Education
- 2024.09 - Present, Columbia University, New York, USA
- Master of Science in Mechanical Engineering (Robotics)
- GPA: 3.92/4.00
- Core Courses: Robotics Learning, Probabilistic Robotics, Optimal Control, Computer Vision
- 2020.09 - 2024.07, China University of Petroleum (Beijing), Beijing, China
- Bachelor of Engineering in Robotics Engineering
- GPA: 87.2/100 (Top 5%)
💻 Research Experience
EKF_SLAM_ROS2: Real-Time Multi-Sensor SLAM System
- Built a real-time EKF-based SLAM framework in ROS2, fusing odometry, IMU, LiDAR, and point cloud data for high-frequency state estimation and robust 2D mapping.
- Implemented core EKF components in C++/Python, including nonlinear prediction–update models, noise modeling, observation processing, and multi-frame coordinate transformations.
- Designed ROS2 node communication, topic and TF management, parameter configuration, and launch structure, forming a modular and reusable SLAM architecture.
- Performed Gazebo simulation and rviz2 visualization debugging; improved cross-platform portability through parameterized modular design, supporting rapid algorithm extension and real-robot deployment.

Autonomous Navigation System based on 3D LiDAR & Vision Fusion (ROS2)
- Built an autonomous navigation system under the ROS2 + NAV2 framework, fusing LIO-SAM lidar odometry with YOLOv8 object detection results.
- Implemented state estimation of moving obstacles via EKF for robust localization and environmental modeling in dynamic environments.
- Constructed task-level behavioral decision logic based on Behavior Trees, enabling the robot to autonomously complete target recognition, candidate task point search, and behavior sequence switching.
- Implemented global path planning (RRT / RRT*) and local obstacle avoidance control using NAV2; combined with obstacle motion trend prediction to execute online trajectory correction.
- Validated sensor noise modeling, parameter calibration, and behavioral strategies in Gazebo, then migrated the system to a physical mobile robot platform (18–25 Hz).
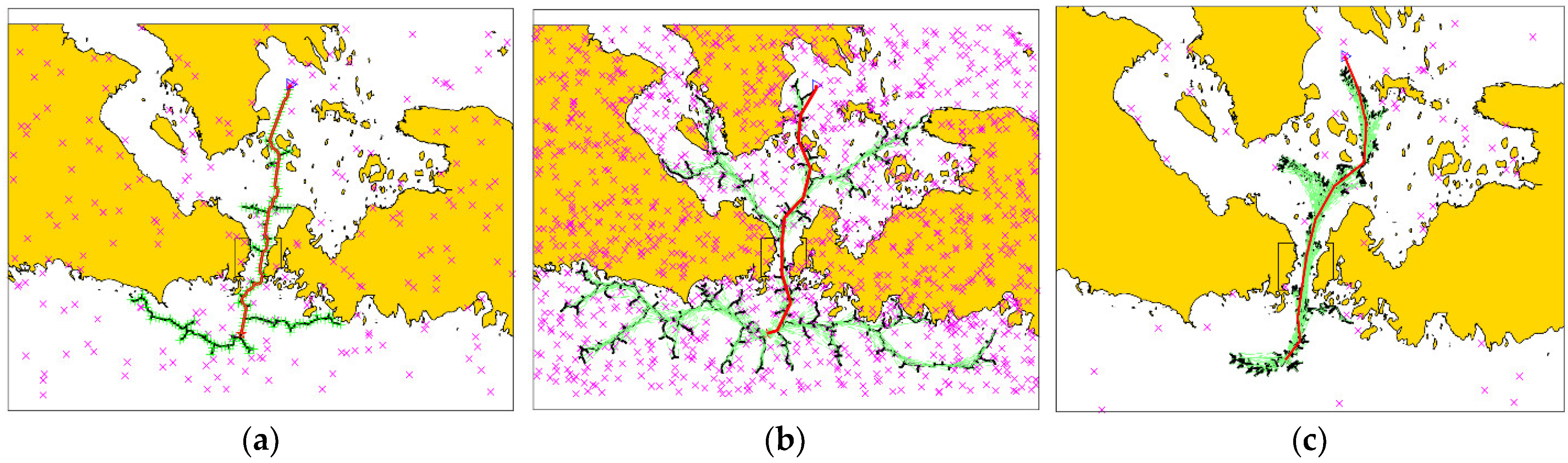
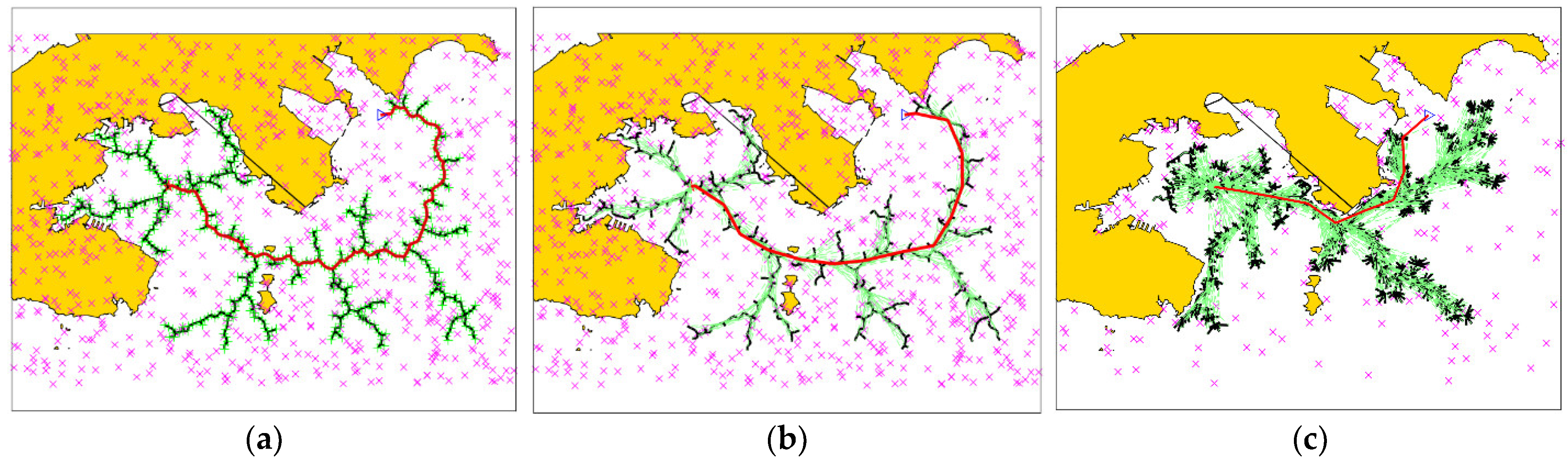
Ship Route Planning for ENC Vector Charts (JMSE)
- Addressed boundary errors and conversion losses in traditional rasterized charts by using ENC vector chart data to construct channel configuration spaces.
- Organized vector data based on Delaunay triangulation and embedded ship kinematics constraints (fixed speed, turning radius, heading change) in path search.
- Proposed VK-RRT* algorithm, integrating kinematics constraints and goal-biased sampling. Experiments showed ~23% reduction in path length compared to standard RRT*.
- Verified algorithm generality in island channel and port vicinity scenarios.
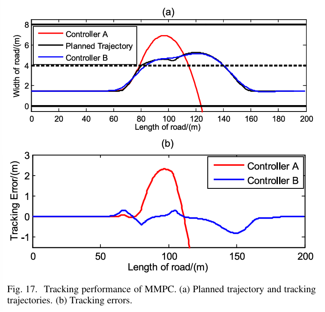
Multi-constraint MPC for Vehicle Obstacle Avoidance Trajectory Tracking
- Designed a multi-constraint MPC controller constraining sideslip angle, yaw dynamics, and tire forces, introducing a curvature-adaptive cost function.
- MATLAB/Simulink Simulation: Reduced vehicle sideslip by ~30% and improved path smoothness by ~20% compared to single-constraint methods.
- Demonstrated stability under different curvature, obstacle layouts, and road conditions, reflecting controller robustness.

Binocular Ranging & EKF-based Target Tracking & Shooting System
- Implemented a target keypoint detection pipeline based on YOLOv8-pose, extracting shooting part pixel coordinates and mapping them to 3D scene positions.
- Designed and implemented an Extended Kalman Filter (EKF) fusion module, fusing IMU, drive motor encoders, and camera observations for recursive estimation of target pose/velocity and short-term trajectory prediction.
- Modeled target motion and ballistic dynamics, constructing a real-time trajectory generation and launch angle/timing calculator.
- Verified automatic hitting performance at 6–8 m distances under continuous motion conditions (Experimental hit rate ~92%).
- Demo Video
STM32 HAL–Based Mid-Layer Robot Control Library
- Developed a reusable mid-layer control library based on the STM32 HAL framework, integrating motor drivers, IMU data processing, chassis kinematics, gimbal attitude control, and host-computer communication protocols into a unified interface.
- Supported multiple mobile platforms including Mecanum, Swerve, and two-wheel self-balancing robots modeled as inverted pendulums; built state-space formulations and implemented LQR-based attitude stabilization, providing unified kinematic and dynamic computation functions across platforms.
- Decoupled execution control and perception data flow, designing a modular task loop and device abstraction layer to improve maintainability and system extensibility.
- The control library was reused across several competition and research robots, significantly reducing hardware porting effort and control-strategy iteration cost.
📝 Publications & Patents
- He, Q., Hou, Z., & Zhu, X. (2023). A novel algorithm for ship route planning considering motion characteristics and ENC vector maps. Journal of Marine Science and Engineering, 11(6), 1102.
- Patent: “Security Patrol Robot Based on Mecanum Wheels” (CN116620448A).
💼 Internships & Leadership
- 2023.07 - 2023.10, Algorithm Engineer Intern, Peitian Robotics, Beijing
- Conducted manipulator dynamics identification based on neural networks, improving torque prediction accuracy by ~20%.
- Updated control models and optimized parameters, significantly improving joint trajectory tracking stability and consistency.
- 2022.05 - Present, Co-founder / R&D Lead, Beijing Smart Potato Technology Co., Ltd., Beijing
- Designed teaching robot platform MP-0 (ESP32 + ROS), used in courses and competitions at 3 universities.
- Organized training and built robot education modules covering embedded control and perception applications.
🎖 Honors and Awards
- 2023, National ROBOCON - First Prize
- 2022, National ROBOCON - Second Prize
- 2022, National RoboMaster - Second Prize
- 2021, National RoboMaster - Second Prize
🛠 Skills
- Robot Algorithms: SLAM, State Estimation, Motion Planning, Model Predictive Control (MPC), Robot Dynamics
- Programming & Platforms: Python, C/C++, MATLAB; ROS2, STM32, JAVA, React
- Tools & Frameworks: Gazebo, RViz, Simulink, PyTorch, OpenCV, Git